Симметричное моделирование физических свойств гибкой структуры силиконовых материалов для управления пневматическими мягкими приводами
Текущее состояние. В связи с существенными достижениями в области технологии материалов, область мягкой робототехники привлекает все большее внимание. Мягкие роботы, в отличие от своих жестких аналогов, обладают превосходной адаптируемостью к окружающей среде, повышенной гибкостью и безопасностью, что делает их очень подходящими для сложных сценариев применения, таких как спасательные операции и медицинские вмешательства. Использование роботов стало незаменимым продуктом в промышленном производстве и быту. Роботы в традиционном понимании в основном основаны на жестких конструкциях. Однако традиционные роботы с твердым корпусом ограничены своей собственной механической конструкцией, и их эксплуатация сопряжена с неизвестными рисками для безопасности. Он не может адаптироваться к различным сложным условиям выполнения миссий, и все еще существует много трудностей и вызовов в приложениях с особыми потребностями, таких как разведка месторождений полезных ископаемых, спасение при стихийных бедствиях и научные исследования.
Решаемая научная проблема. В данной статье исследуется новый тип пневматического программного привода. Привод использует комбинацию мягкого материала привода и пневматического управления, что обеспечивает высокую гибкость и универсальность. За счет использования потока газа внутри мягкой конструкции обеспечивается высокоточное и гибкое управление движением. В процессе проектирования учитываются расширяемость и адаптивность конструкции, чтобы привод мог адаптироваться к различным рабочим условиям и требованиям задач. Результаты экспериментов показывают, что пневматический мягкий привод демонстрирует отличные эксплуатационные характеристики с точки зрения точности, скорости отклика и управляемости. Это исследование дает новые идеи и методы для развития области пневматических приводов и имеет широкие перспективы применения.
В данной статье также моделируются мягкий пневматический привод, на основе моделирования оптимизируется структура и, наконец, тестируется работоспособность привода.
Методы исследования. В данной статье была использованы методы компьютерного моделирования для оценки и улучшения производительности мягких пневматических приводов. Исследование имитационной модели пневматических мягких приводов направлено на совершенствование конструктивных параметров и улучшение рабочих характеристик мягких пневматических приводов для повышения их производительности и надежности. Для создания имитационных моделей мягких пневматических приводов необходимо исследование их математических моделей.
Детали исследования. Для сравнения влияния различных факторов на угол изгиба в данной статье использованы управляющие переменные для моделирования и последующего анализа трех факторов: толщины стенок воздушной полости, высоты воздушной полости и расстояния между воздушными полостями. Управляющие переменные — это тип переменной, используемый для проверки точности любого эксперимента, поскольку контрольная переменная является неотъемлемой частью плана эксперимента. Контрольные переменные широко используются в области исследований, где проводятся эксперименты для сравнения нового подхода со стандартным исходным уровнем. Для исследования модели были выбраны три параметра моделирования, приведенные в таблице 1.
Таблица 1. Параметры моделирования мягких пневматических приводов [составлено авторами]
Фактор | Параметр (мм) | ||
1 | 2 | 3 | |
Толщина стенки воздушной полости | 1,5 | 2,0 | 2,5 |
Расстояние для исследования воздушной полости | 1,5 | 2,0 | 2,5 |
Высота воздушной полости | 10 | 11,0 | 12,0 |
В ходе проведенного эксперимента изменялась комбинация параметров каждого фактора для составления кривой угла изгиба и положения, чтобы исследовать влияние различных факторов и параметров на производительность мягких пневматических приводов для составления рекомендации к их проектированию и управлению. При различном давлении воздуха получены диаграммы расстояния и угла изгиба воздушной стенки (рисунок 1), диаграмма высоты и угла изгиба воздушной стенки (рисунок 2).
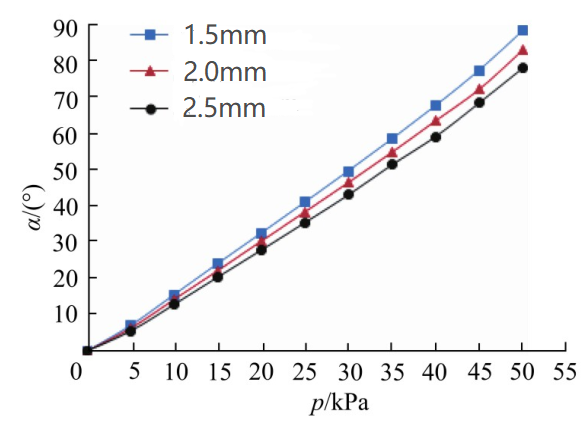
Рис. 1. Диаграмм расстояния и угла изгиба воздушной стенки
Из рисунка 1 видно, что расстояние между воздушными полостями отрицательно коррелирует с изменением угла изгиба мягкого привода.
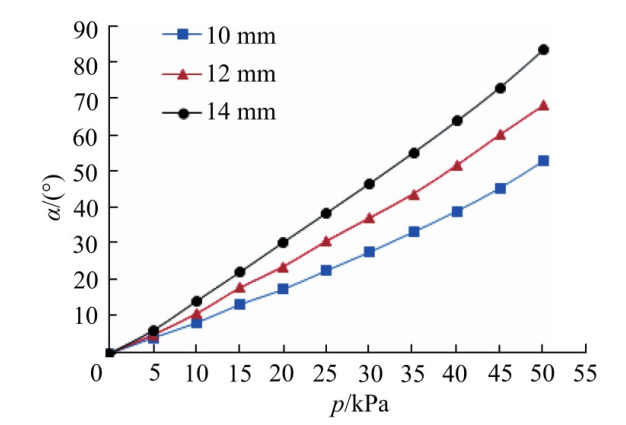
Рис. 2. Диаграмма высоты и угла изгиба воздушной стенки
Из рисунка 2 видно, что увеличение высоты воздушной полости ведет к увеличению угла изгиба привода
Путем конечно-элементного анализа мягких приводов под действием различных факторов в диапазоне выбранных факторов и параметров видно, что привод достигает наилучшего изгибающего эффекта при комплексном воздействии различных факторов и параметров. Таким образом, сочетание факторов и параметров в этом диапазоне выбрано таким образом, что толщина стенки воздушной полости 1,5 мм, высота воздушной полости 14 мм и расстояние между воздушными полостями 1,5 мм, как наилучшая комбинирование параметров жесткого элемента.
Мягкий привод по этому параметру моделируется и анализируется при давлении 0~50 кПа. На рис. 3 показана диаграмма деформации привода при изгибе при наилучшем сочетании. По мере увеличения давления воздуха деформация программного привода продолжает увеличиваться, и напряжение в основном концентрируется на контакте с соседней воздушной полостью.
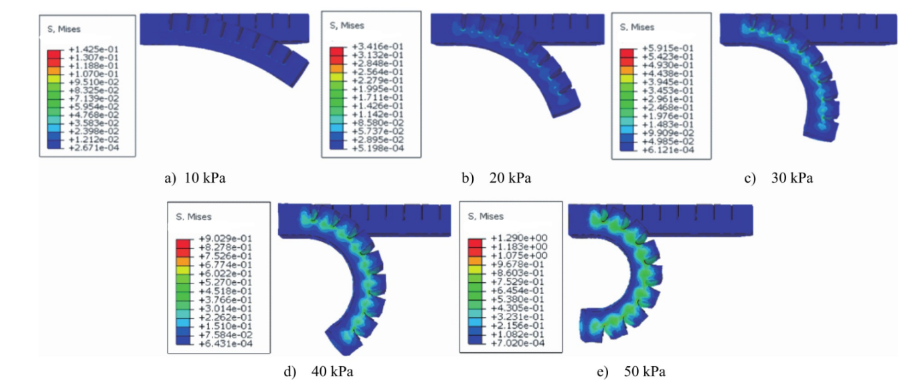
Рис. 3. Диаграмма оптимальной комбинации параметров деформации изгиба
Заключение. Результаты экспериментальных измерений показывают, что при различном давлении воздуха угол изгиба привода в основном совпадает с тенденцией имитационной модели. Однако из-за определенных ошибок в процессе изготовления физических объектов угол изгиба, измеренный экспериментально, немного превышает результаты моделирования методом конечных элементов при том же давлении воздуха. Кроме того, диапазон движения, измеренный в эксперименте, несколько шире, что дополнительно подтверждает достоверность результатов имитационного анализа. Таким образом, благодаря исследованиям, описанным в этой статье, мы предложили новый тип пневматического мягкого привода и выполнили его конструктивное проектирование, определение рабочих параметров и имитационный анализ. Эти результаты исследований обеспечивают важную теоретическую и экспериментальную основу для дальнейшей оптимизации и применения пневматических мягких приводов.