Исследование интеллектуальной системы ассиметричного позиционирования персонала, транспортировки и мониторинга оборудования в угольной шахте
Текущее состояние. При осуществлении горнодобывающих работ сложность окружающей среды, опасность производственного оборудования и закрытость рабочего места превращают угольную шахту в место повышенной опасности. Для того чтобы эффективно повысить уровень управления безопасностью на шахте и снизить количество несчастных случаев, широко изучается и применяется интеллектуальная шахтная система. В такой системе выявление возможных опасностей для персонала на ранних стадиях является очень важной частью. Контролируя положение и поведение персонала в режиме реального времени, система может своевременно обнаружить угрозы безопасности, сделать раннее предупреждение и предотвратить несчастные случаи.
Решаемая научная проблема. В статье предлагается в рамках исследования интеллектуальной системы позиционирования персонала, а также транспортировки и мониторинга оборудования в условиях работ в угольной шахте изучить архитектуру шахтной системы, состоящей из модулей определения местоположения персонала, обнаружения транспортных процессов и безопасного обнаружения неисправностей оборудования. Моделирование вышеуказанных процессов позволит подтвердить достоинства интеллектуальной системы, а также провести оценку и выявить способы оптимизации производительности модели.
Методы исследования. Предлагается провести исследование интеллектуальной системы, объединяющей технологии конволюционной нейронной сети (CNN) и технологии OpenPose для повышения безопасности и эффективности горных работ путем обнаружения и идентификации местоположения и поведения персонала, расчета расстояния до опасных зон в режиме реального времени и анализа позы для выявления рисков, таких как падения или неподвижность.
Кроме того, система включает в себя мониторинг транспорта и оборудования для отслеживания перемещений, предотвращения столкновений и обеспечения эффективности работы. В режиме реального времени генерируются предупреждения об аномальном поведении, неисправностях оборудования и угрозах безопасности. Это комплексное решение для улучшения управления шахтой, снижения аварийности и повышения общей безопасности в сложных горнодобывающих условиях.
Детали исследования. При проведении эксперимента распознавания изображения предпочтение было отдано следующим технологиям и техническим средствам:
CNN-модель: Модель CNN для определения местоположения персонала выбрана из Faster R-CNN, поскольку эта модель обладает высокой точностью обнаружения и хорошей способностью к обобщению, и подходит для обнаружения персонала в реальном времени в горнодобывающей промышленности.
OpenPose: Использовалась для оценки позы и анализа поведения. OpenPose анализирует позу человека в реальном времени с помощью определения ключевых точек человека и является основным инструментом для обнаружения поведения и раннего предупреждения об опасности.
Python + OpenCV: базовый фреймворк для обработки изображений и видео. OpenCV – это мощная библиотека для обработки изображений, которая эффективно обрабатывает кадры и интегрируется с моделями глубокого обучения.
PyTorch/TensorFlow: в качестве фреймворка глубокого обучения для модели CNN и модели OpenPose, он обеспечивает загрузку модели, обучение и функции вывода.
Обучение CNN-модели. При создании системы обнаружения персонала в горнодобывающей зоне необходимо сначала обучить модель CNN на сцене горнодобывающей зоны. В качестве основы можно использовать общедоступные наборы данных COCO, а затем конкретные изображения сцен в горнодобывающих районах можно использовать для трансферного обучения, чтобы улучшить работу модели в горнодобывающей среде.
Модели OpenPose могут быть выведены непосредственно с помощью предварительно обученных моделей. Однако в некоторых сложных сценариях добычи полезных ископаемых может потребоваться тонкая настройка модели, например, в плотной толпе или при плохом освещении способность модели оценивать отношение может снизиться.
На вход системы были поданы изображения (рис. 1 - 3). Графа на рисунке - это метка для персонала, показывающая его положение в реальном времени, а результат прогнозирования на графе показывает его состояние в реальном времени, например, нормальное в начале, что указывает на то, что персонал пребывает в безопасности (рис. 1).
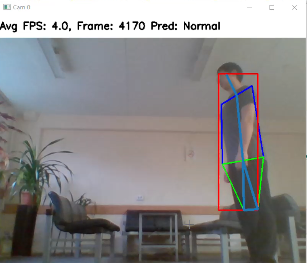
Рисунок 1. Результат моделирования – нормальный
Когда блок обнаруживает, что положение ключевого узла персонала соответствует определению падения, результат предсказания показывает падение, указывая, что персонал получит раннее предупреждение об опасности (рис. 2–3).
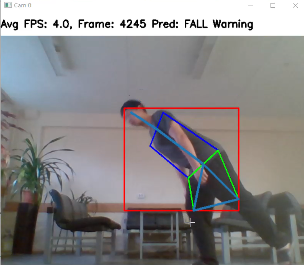
Рисунок 2. Результат моделирования - Предупреждение о падении

Рисунок 3. Результат моделирования – падение
При нормальном состоянии значение возвращается к норме.
Заключение. В статье проведено исследование интеллектуальной системы позиционирования персонала, транспорта и мониторинга оборудования, основанной на технологиях свёрточных нейронных сетей и OpenPose. В результате выявлены основные функциональные возможности данной системы:
1. Возможность ввода различных типов данных (фотографии или видеозаписи районов добычи).
2. Позиционирование персонала (система определяет местоположение и тип персонала в реальном времени с помощью CNN-модели).
3. Анализ опасных зон (система отслеживает опасные зоны, отмеченные на карте шахты, и рассчитывает расстояние между персоналом и опасными зонами в режиме реального времени).
4. Обнаружение поведения (система использует OpenPose для анализа позы идентифицированного человека и выявления ненормального поведения, например, падения или длительной неподвижности).
5. Система раннего предупреждения(при обнаружении опасных людей или проникновении в зону система подаст сигнал тревоги).
Установлено, что данная система охватывает ключевые звенья шахтных работ и способна реализовать комплексное интеллектуальное управление персоналом, материалами и оборудованием. Система не только повышает безопасность шахты, но и обеспечивает мощную техническую поддержку для эффективной работы и устойчивого развития шахты за счет оптимизации распределения ресурсов и интеллектуального планирования.