Исследования систем управления и предиктивной диагностики электродвигателей
Текущее состояние. Современное промышленное производство предъявляет высокие требования к надежности и эффективности оборудования, так как даже кратковременные простои могут привести к значительным финансовым потерям и нарушению технологического процесса. Электродвигатели, составляющие основу большинства электромеханических систем, подвержены износу и аварийным сбоям, что делает их диагностику и контроль актуальной задачей. Традиционные подходы к управлению часто оказываются недостаточно эффективными, поскольку они не всегда позволяют своевременно обнаружить признаки неисправности или быстро адаптироваться к изменяющимся условиям работы двигателя.
Использование системы управления, сочетающей предиктивную диагностику и модельное предиктивное управление (MPC), открывает новые возможности для повышения стабильности и эффективности работы электродвигателей. Такой подход основан на прогнозировании состояния двигателя на несколько шагов вперед, что позволяет своевременно выявлять отклонения от нормы и принимать корректирующие меры до появления критических неисправностей. MPC-контроллер, интегрированный с системой диагностики, способен учитывать ограничения по токам и напряжениям, что минимизирует риск перегрева или перегрузки двигателя и значительно продлевает срок его службы.
Решаемая научная проблема. Разработка и внедрение подобных решений требуют глубокого моделирования и настройки, включая использование искусственных нейронных сетей для повышения точности прогноза. Разработка такие гибридных систем является актуальной задачей, поскольку позволяет улучшить качество управления, сократить время реакции системы на отклонения и обеспечить более надежную эксплуатацию оборудования в целом.
В статье рассмотрены вопросы управления и диагностики электродвигателей с использованием методов прогнозирования. В частности, исследуется использование нейросетевых моделей и предиктивного управления для повышения точности и надежности. Основной целью данного исследования является разработка нейросетевого контролера на основе предиктивного управления по модели (MPC), что позволит улучшить качество работы системы управления и диагностики электродвигателей, обеспечивая их стабильность и предотвращая возможные неисправности.
Методы исследования. Модель предиктивного управления (MPC) — это современный метод управления, в котором используется модель для прогнозирования ее поведения на ограниченный временной интервал, называемый горизонтом предсказания. На основе этих прогнозов и текущего измеренного/оцененного состояния системы рассчитываются оптимальные управляющие воздействия для достижения целей управления при соблюдении ограничений системы [8-9]. Через определенный промежуток времени процесс измерения, оценки и расчета повторяется со сдвинутым горизонтом, что делает МРС динамическим и адаптивным инструментом управления (рис. 1).
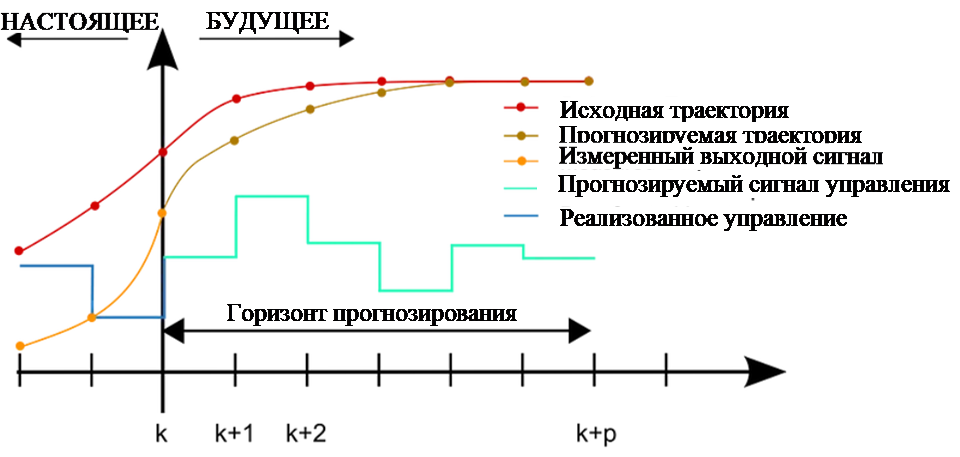
Рисунок 1. Структура регулятора на основе модели предиктивного управления
Детали исследования. В данной работе в качестве тестовой модели выбран синхронный двигатель с постоянными магнитами. Поскольку управление током минимизирует потери в сопротивлении и снижает нагрев привода, наблюдаемыми параметрами являются ток и напряжение статора, которые определяют общую эффективность системы. Эти параметры не только непосредственно влияют на энергоэффективность двигателя, но и обеспечивают оптимальное тепловое поведение, предотвращают преждевременный износ и повышают долговременную надежность оборудования.
Для первичной оценки системы был запущен тест без контроллера, который показал, что параметры двигателя быстро выходят за допустимые границы, что приводит к отказу системы (отказы отмечены красными вертикальными линиями на графике) (рис. 2).
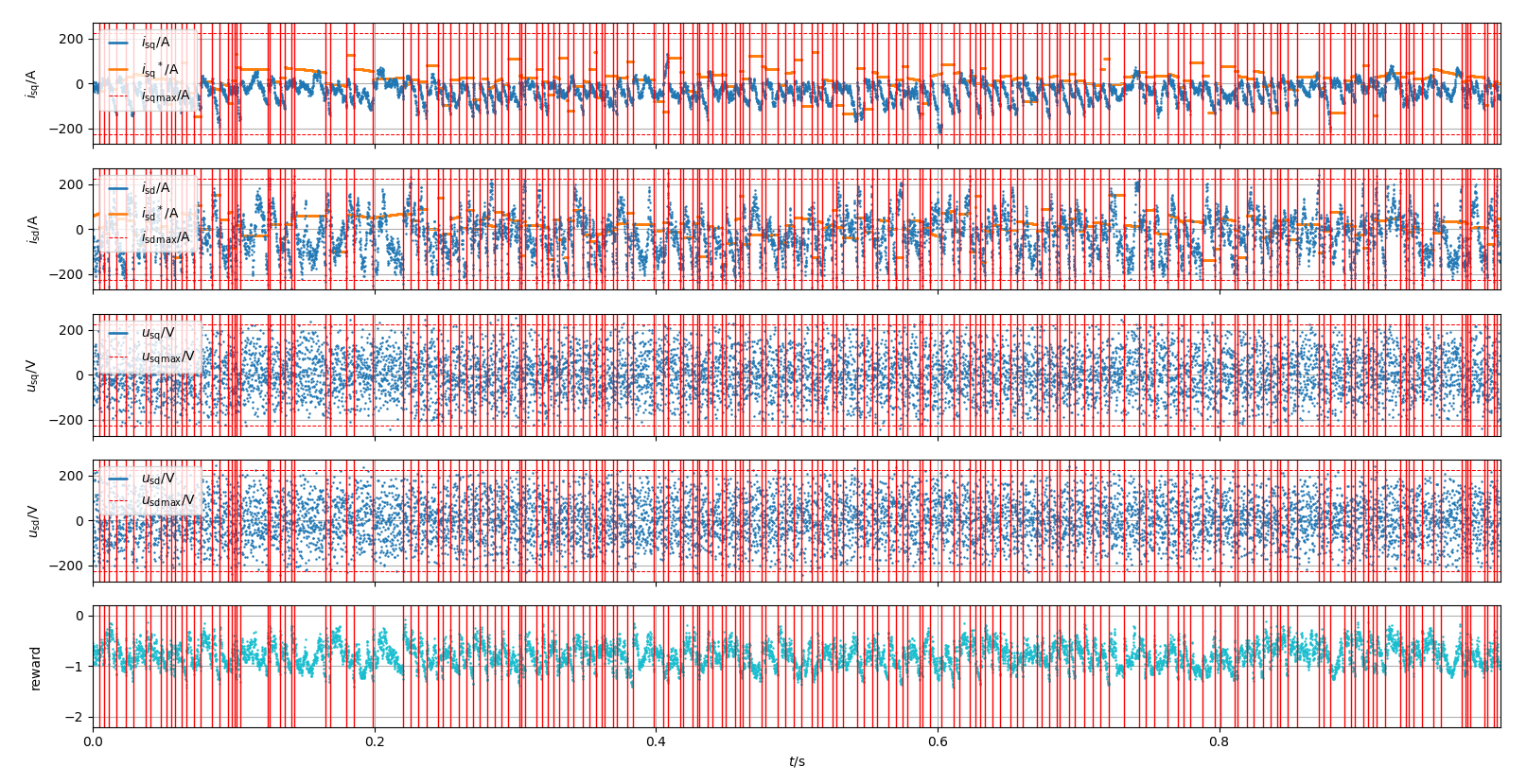
Рисунок 2. Результаты моделирования системы без контроллера
Это подтверждает необходимость управления параметрами с использованием контроллеров для предотвращения сбоев.
Заключение. В ходе проведенного исследования проанализированы существующие системы предиктивного управления электродвигателями, включая классические MPC-контроллеры и контроллеры на основе нейронных сетей. Изучены процесс разработки и моделирования электродвигателя. Рассмотрены особенности проектирования, как традиционного контроллера, так и предиктивного, в основу которого были положены обучаемые элементы искусственной нейронной сети. Также в статье представлены результаты тестирования и сравнительный анализ эффективности предложенных контроллеров, что, в свою очередь, позволяет объективно оценить их преимущества и недостатки.
Проведенные тесты показали, что предиктивный контроллер, основанный на нейронной сети, имеет на 24% меньшую ошибку управления по сравнению с традиционным алгоритмическим контроллером и почти в два раза меньше ошибку, чем ПИД-регулятор. Кроме того, разработанный предиктивный контроллер показал более высокую скорость реакции, что является важным преимуществом в ситуациях, требующих немедленного вмешательства и тонкой настройки. Результаты эксперимента показали, что предиктивный контроллер обеспечивает более стабильное и надежное управление, эффективно предотвращая возможные аварийные ситуации и обеспечивая оптимальную работу двигателя в пределах заданных параметров.
Полученные результаты подтверждают высокую точность модели контроллера и его способность решать задачи предиктивного управления. Это делает разработанную систему управления электродвигателем и предиктивной диагностики на основе нейросетевого подхода ценным инструментом для повышения безопасности и эффективности промышленных электродвигателей.
Настоящее исследование вносит значительный вклад в область предиктивной диагностики и управления, предлагая перспективное решение для мониторинга и прогнозирования состояния электродвигателя. Улучшение производительности может быть достигнуто за счет применения более сложных многослойных моделей LSTM и других архитектур нейронных сетей. Это могут быть сверточные нейронные сети (CNN), позволяющие извлекать пространственные признаки, и рекуррентные нейронные сети (RNN), позволяющие лучше обрабатывать временные зависимости. В дальнейших исследованиях предлагается изучить возможность использования этих моделей для повышения точности прогнозирования и робастности управления, так как эти типы сетей позволяют системе учитывать более широкий спектр факторов и динамических процессов. Также планируется интегрировать методы обучения с подкреплением для обеспечения адаптивности и саморегулирования системы в условиях изменяющихся внешних воздействий и неопределенности. Это позволит оптимизировать процесс управления двигателем в более сложных и нестабильных условиях эксплуатации.