Мониторинг и диагностика электромеханического оборудования горных предприятий на основе машинного обучения
Текущее состояние. Широко используемые в составе электромеханического оборудования горных предприятий асинхронные двигатели подвержены отказам, вызванным частыми пусками-остановками, перегрузками, износом и выходом из строя компонентов. Эти отказы могут привести к серьезным последствиям, включая аварии на производстве и экономические потери. В данной статье предлагается углубленное исследование технологии диагностики неисправностей двигателей. Было показано, что существующие алгоритмы интеллектуальной диагностики двигателей имеют низкий диагностический эффект в переменных условиях эксплуатации, а надежность результатов диагностики, основанных на отдельных сигналах, является недостоверной.
Решаемая научная проблема. Являясь одним из важных источников кинетической энергии для промышленного и сельскохозяйственного производства, асинхронные двигатели обладают рядом преимуществ, таких как простота конструкции, легкость демонтажа, низкая цена материала изготовления, высокая надежность и долговечность. Они широко используются в горном оборудовании и металлургии, станках, электростанциях, вентиляторах и других областях промышленности. Стабильная и надежная работа двигателя связана не только со стабильной и долговременной работой отдельного механического оборудования, но и влияет на стабильность всей производственной системы. Как только асинхронный двигатель выйдет из строя, работа оборудования будет прервана, эффективность работы снизится, а потребление энергии возрастет. В тяжелых случаях вся система разрушается, что приводит к огромным экономическим потерям и жертвам. Кроме того, трудно устранить внезапные сбои, что приведет к еще большему ущербу. В настоящее время управление безопасностью асинхронных двигателей в основном зависит от регулярного технического обслуживания. Использование двигателя оценивается путем проверки и ремонта различных частей двигателя, что чревато слепым обслуживанием и нерациональным использованием ресурсов. С предложением и продвижением Интернета вещей, состояние работы различных частей асинхронного двигателя в реальном времени можно отслеживать с помощью передовых сенсорных технологий. Поэтому важным направлением исследований стала реализация ранней диагностики неисправностей двигателя в режиме онлайн на основе собранных сигналов. Традиционная диагностика неисправностей двигателя часто опирается на пороговые методы оценки, но асинхронные двигатели обычно работают в сложных условиях, и ранние характеристики неисправности часто погружены в шум, так что неисправность обнаруживается слишком поздно, что приводит к несвоевременному ремонту неисправности двигателя. В настоящее время промышленное оборудование в целом стремится стать беспилотным и интеллектуальным, алгоритмы искусственного интеллекта быстро развиваются, и технология диагностики неисправностей обновляется соответствующим образом. Интеллектуальные алгоритмы диагностики, не требующие экспертного опыта, обладают такими преимуществами, как хороший диагностический эффект и высокая устойчивость, и находят применение в области диагностики неисправностей электродвигателей.
Технологии диагностики неисправностей двигателей можно условно разделить на четыре категории: основанные на сигналах, основанные на механической теории, основанные на моделях и основанные на моделировании. На начальном этапе развития особой популярностью пользовались алгоритмы диагностики неисправностей, основанные на механической теории. Они в основном теоретически исследовали проявления различных неисправностей двигателя. Однако они не могли создать математическую модель, точно описывающую механизм неисправности, и модель не могла отражать реальное рабочее состояние двигателя, что имело очевидные недостатки. Благодаря развитию технологий обнаружения сигналов, обработки сигналов и алгоритмов искусственного интеллекта, алгоритмы диагностики неисправностей на основе сигналов и на основе традиционных моделей машинного обучения получили соответствующее развитие. В области диагностики неисправностей они обладают значительными преимуществами, такими как высокая эффективность диагностики, высокая скорость и хорошая точность. В настоящее время основная сложность заключается в необходимости ручного выбора признаков и требует большого количества данных для обучения сети.
Методы исследования. Алгоритм диагностики неисправностей на основе моделирования в основном использует популярные программы цифрового моделирования для создания эффективной физической модели, похожей на реальный двигатель, и выдает такие отклики, как ток, вибрация и даже акустические сигналы, интуитивно отражающие физические изменения двигателя во время работы. С наступлением эры больших данных и искусственного интеллекта технология интеллектуальной диагностики неисправностей на основе алгоритмов глубокого обучения постепенно вытесняет технологию диагностики на основе традиционных интеллектуальных алгоритмов. Глубокое обучение, ставшее основным направлением исследований в новую эпоху, было широко изучено и опробовано в области диагностики неисправностей электродвигателей. Каждый алгоритм диагностики имеет свои преимущества и ограничения. Существующие интеллектуальные алгоритмы диагностики не являются точными в диагностике междоменных неисправностей, и большинство алгоритмов требуют большого количества обучающих данных. В реальной технике, поскольку оборудование в основном находится в рабочем состоянии во время эксплуатации, неисправности обычно происходят в течение очень короткого времени, что приводит к недостатку данных о неисправностях и несбалансированным выборкам. Поэтому в данной работе предлагается исследовать метод диагностики неисправностей двигателя и распознавания классификации на основе глубокого обучения для повышения точности диагностического алгоритма в различных условиях эксплуатации оборудования и при недостаточном количестве обучающих выборок.
Детали исследования. Экспериментальный анализ моделей глубокого обучения. Реализация глубокого обучения в контексте диагностики неисправностей двигателя не требует обработки сигнала. Извлечение признаков и другие операции могут быть выполнены непосредственно на исходных текущих образцах в качестве обучающих и тестовых наборов для глубокого обучения. Использование сети глубокого обучения, в частности сети глубокого обучения ResNet, выбранной в данной работе, необходимо для идентификации состояния.
На этапе обучения обучающие выборки используются в качестве входных данных для сети глубокого обучения, а результаты диагностики текущей сети для обучающего набора проверяются путем минимизации функции потерь. На этапе тестирования итеративно вычисляется функция потерь для тестового набора и определяется точность диагностики неисправности для тестового набора. Когда потери обучающего набора сходятся, это означает, что сеть для тестирования обучена, а точность диагностики для тестового набора является окончательной точностью диагностики. На примере скорости 2100 об/мин инициализируются параметры и веса модели глубокой сети ResNet, для обучения модели используется обучающий набор на скорости 2100 об/мин, а тестовый набор на той же скорости подается в сеть для прогнозирования и вывода диагноза. Кривые функции потерь на этапах обучения и тестирования, а также точность диагностики модели представлена ниже (рисунок 1).
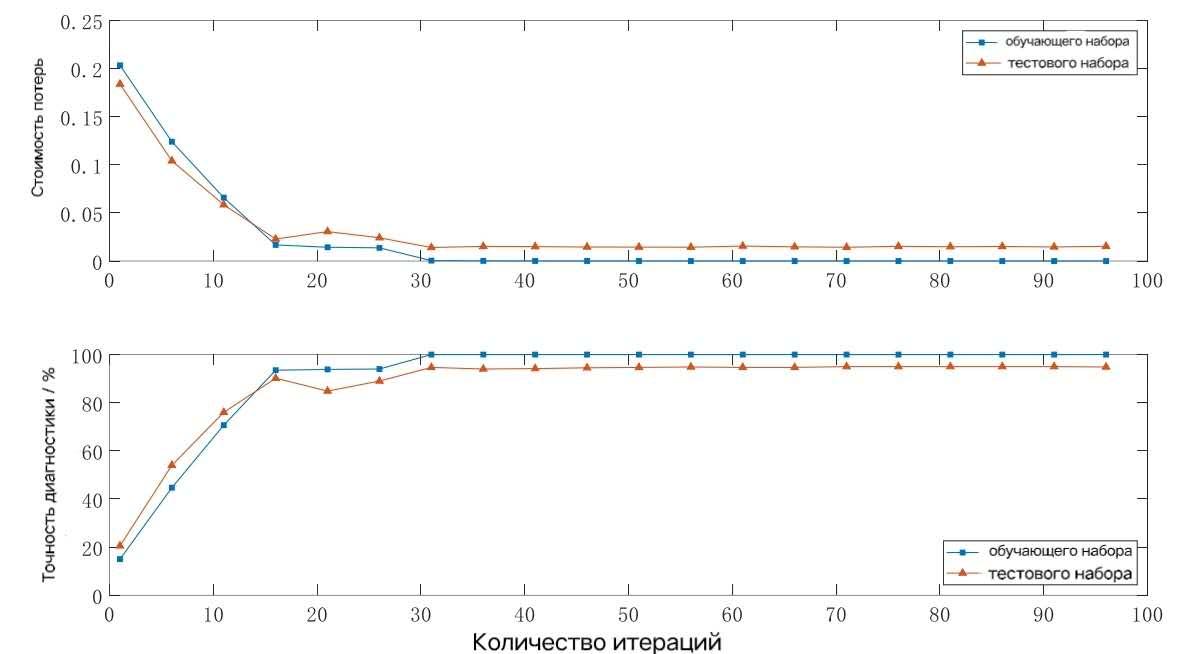
Рисунок 1. Результаты работы модели на основе ResNet при 2100 об/мин
Как показано на рисунке 1, функция потерь обучающего набора начинает сходиться на 31-й итерации, потери сети близки к 0, и эффект валидации обучающего набора достигает 100%. В то время, как потери сети тестового набора имеют тенденцию быть стабильными, и точность диагностики достигает 95,17% после небольшого колебания, т.е. точность выбранной модели диагностики неисправностей электродвигателей на основе глубокого обучения ResNet для неисправностей при 2100 об/мин достигает 95,17%. В этих условиях окончательные результаты классификации, полученные с помощью матрицы путаницы, показаны на рис.13. Горизонтальная координата - реальная метка образца, а вертикальная - предсказанная метка.
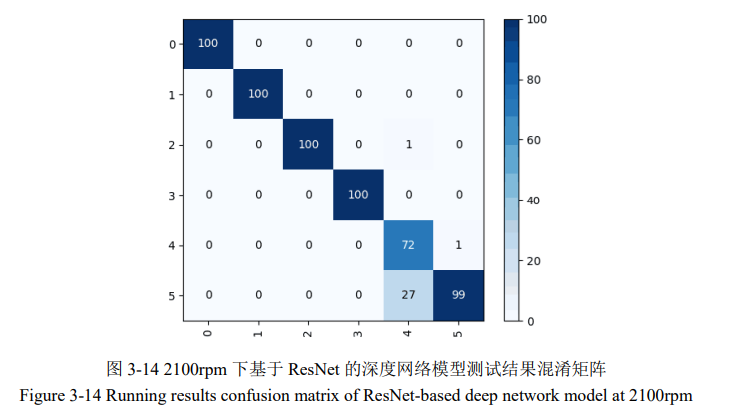
Рисунок 2. Матрица путаницы результатов работы модели глубокой сети на основе ResNet при 2100 об/мин
Как показано на рисунке 2, модель глубокого обучения способна полностью идентифицировать четыре состояния двигателя: нормальное, неисправность обрыва шины, неисправность эксцентрика и межвитковое короткое замыкание. Для неисправностей подшипников было очень мало ошибочных примеров, а для неисправностей дисбаланса обмотки статора из 100 примеров только 72 были оценены правильно, из них 27 примеров были ошибочно диагностированы как неисправности подшипников.
Заключение. Для решения проблемы низкой диагностической точности диагностической модели глубокого обучения на основе ResNet в переменных условиях эксплуатации была представлена теория глубокого обучения. В результате были построены два вида диагностических моделей неисправностей двигателя, основанных на миграции параметров и миграции признаков, для переменных условий эксплуатации. Модель миграции параметров включает следующие шаги: во-первых, неглубокие параметры глубокой сети на основе ResNet, обученной в исходном регионе, подаются в целевую модель ResNet; во-вторых, неглубокие параметры целевой модели ResNet замораживаются; в-третьих, образцы тонкой настройки используются для точной настройки целевой модели ResNet для диагностики неисправностей в тестовом наборе в целевом регионе. Эксперименты показывают, что модель миграции признаков более эффективна, чем модель миграции параметров, в диагностике неисправностей двигателя на разных скоростях вращения, с точностью диагностики 92,17%, 88%.